Step By Step PDF of how to build a “Yes/No” custom buttons display with a Raspberry Pi Pico, 2 x Custom Made Buttons & 2x7segment 4 digit LED backbacks
We have uploaded a PDF of the steps to build a “Yes/No” Custom Button + LED Digit displays on a raspberry Pi Pico , with step by step guide on how to make the custom wooden buttons, and the easy implementation of the adafruit_ht16k33 library for the LED Backpacks.
You can also download the zip file of the code here.
Phil’s working on some interactive electronics for a project, and he was asked to create a counter that could show how much money you could make from 20p recycling deposits using CircuitPython & a Tiny2040
Phil’s working on some interactive electronics for a project, and he was asked to create a counter that could show how much money you could make from 20p recycling deposits. The counter + button in a #circuitPython was easy to implement (see other “weekly project” posts for a “how to”) – But playing an MP3 file has become incredibly easy with CircuitPython, having the library / code built in to the system! so no need to add a new library or even extra electronics to your CircuitPython Powered Board of Choice! (We’ve been using the Raspberry Pi #Pico & the Pimoroni #Tiny2040 )
Below is a short video of the Tiny2040 + button + mono speaker counting up when the counter value is sent to a function that converts it to a list of MP3’s to play.
Tiny2040 + Button + Mono Speaker playing MP3s
Phil took a while to create an algorithm to create a “sentence” that stitches together the necessary files needed… using small MP3 files saved to the 8mb Tiny2040. The numbers 1 to 20 were recorded, then, 30, 40, 50, 60, 70, 80 & 90. Phil also created with a speech synthesiser, “pence”, “and”, “pound”, “pounds” – which can then create any number up to 999 (Thousands + were unnecessary at the moment!) When it reaches “£100” – a clip saying “you’ve made a lot of money, perhaps donate it to charity?” is spoken, then the counter resets !
The code below is Phil’s “Robust” programming… which works nicely, and can even cope with increments of 5p – but single counts break it (his “logic” should be improved – but the 5 / 10 / 20p increments work!
# SPDX-FileCopyrightText: 2020 Jeff Epler for Adafruit Industries
# Custom Code by Philip Thompson / Digital Maker CIC
# SPDX-License-Identifier: MIT
"""CircuitPython Essentials Audio Out MP3 """
import board
import digitalio
from time import sleep
from audiomp3 import MP3Decoder
try:
from audioio import AudioOut
except ImportError:
try:
from audiopwmio import PWMAudioOut as AudioOut
except ImportError:
pass # not always supported by every board!
button = digitalio.DigitalInOut(board.GP0)
button.switch_to_input(pull=digitalio.Pull.DOWN)
audio = AudioOut(board.A0)
# You have to specify some mp3 file when creating the decoder
mp3 = open("none.mp3", "rb")
decoder = MP3Decoder(mp3)
decoder.file = mp3
audio.play(decoder)
# calculate money from number stuff
def convertArrayToString(a):
return(' '.join(map(str, a)))
def last_digit(num):
if 10 < num < 20: # it's a teen!
return [str(num)+".mp3"]
else:
last_digit_unsigned = abs(num) % 10
return [str(num)+".mp3"] if last_digit_unsigned == 0 else [str(num)[0]+"0.mp3", "5.mp3"]
# used in making a sentence of the value of the number
ppp = ['pence.mp3']
lb = ['pound.mp3']
lbs = ['pounds.mp3']
def numToMoney(v):
if v < 20: # unique "quick returns"
return([(str(v)+".mp3")] + ppp)
elif (v > 9999): # no one will make this much money from recycling!?
return(["too_much.mp3"])
elif (15 < v < 100): # just pence
return(last_digit(v) + ppp)
else:
tupV = str(v)
if len(tupV) == 3:
if (tupV[0] == "1"):
lll = lb
else:
lll = lbs
if (tupV[1] + tupV[2] == "00"): # flat £
return([tupV[0]+".mp3"] + lll)
else:
if tupV[1] != "0": # not a "x pounds tens pence
return([tupV[0]+".mp3"] + lll + ["and.mp3"] + last_digit(int(tupV[1]+tupV[2]))+ppp)
else:
return([tupV[0]+".mp3"] + lll + ["and.mp3"] + ["5.mp3"] + ppp)
else:
if (tupV[1] + tupV[2] + tupV[3] == "000"): # flat £
return([tupV[0]+"0.mp3"] + lbs)
else: # complicated number x pounds y (z) pence
tA = tupV[0] + tupV[1]
tB = tupV[2] + tupV[3]
if (tB == "00"):
s = [tA+".mp3"] + lbs
elif (tB == "05"):
s = [tA+".mp3"] + lbs + ["and.mp3"] + ["5.mp3"] + ppp
else:
s = [tA+".mp3"] + lbs + ["and.mp3"] + last_digit(int(tB)) + ppp
return(s)
# res = arr[::-1] #reversing using list slicing
def money(n):
moneyArray = []
moneyArray.extend(numToMoney(n))
#print(moneyArray)
for w in moneyArray:
decoder.file = open(w, "rb")
audio.play(decoder)
#print("playing", w)
while audio.playing:
sleep(0.1)
counter = 0
while True:
while audio.playing:
pass
if button.value:
counter += 20
money(counter)
sleep(0.3)
if counter > 9999:
counter = 0
The Button is in Pin GP0 & the Speaker Signal Out is in pin A0 … you can’t get simpler! Amazing! MP3 files played with CircuitPython on a Tiny2040 – Done!
Not much to show this week from Phil, he’s been getting deep into learning more about OOP in Python, and running into several problems that led him to more exploration, experimentation & fails (so, as we said, not much to show). He also sadly lost his 22 year old cat “Link” this week…
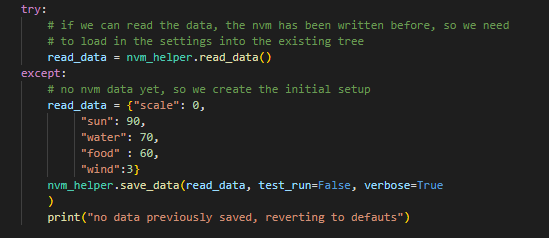
He did however, last week get into “NVM” (Non Volatile Memory) – A very elegant way of writing data to the Pico, so you can save info & recall it when the Pico Starts up again… We had tried using it for the Dinky OSC, but the older versions of CircuitPython didn’t support it, or at least were buggy with the ability to save without hanging the Pico (and forcing “Nuke ReFlashes!”).
Martin had read on the fantastic CircuitPython discord channel that the NVM issues had been addressed in the latest version. And so Phil re-opened his exploration of the use of NVM on a Pico… Phil did a quick search on discord & found :
Phil followed the link, downloaded the library from FoamyGuy and within minutes, had a fully working, easily updateable way of reading & writing info to NVM ! Like a dream you can save a dictionary via NVM_helper & all the byte conversions are sorted in that amazing script… So! Phil is back on track to keep track of the digital Tree , so we can implement the Real Time Clock & apply the effect of time to the tree depending on how often the tree is watered & fed & given sunlight! We will then hopefully see the fully working Tamagochi-esque digital tree…
For our new project we think at some point we are going to need to have an accurate measure of time that has passed and for this we will need a real time clock.
For our new project we think at some point we are going to need to have an accurate measure of time that has passed and for this we will need a real time clock.
The Pico doesn’t have it’s own clock, and for that matter non of the Raspberry Pi family do, a quick google search revealed a few different boards that could offer this facility.
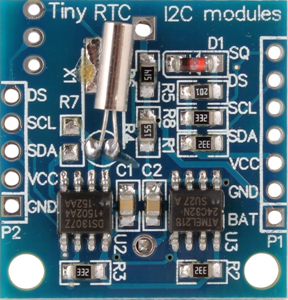
I decided to go with one that was based on a DS1307 and communicated via I2C. I ordered three of them from Amazon at a cost of £4.99. They arrived complete with installed batteries, with a claimed running time of a few years which would be more than enough for our project.
DS1307 Module
Another Google search was undertaken to find out how to connect them to a Raspberry Pi Pico. Most articles suggested that they were primarily a 5V device as they were originally designed for use with an Arduino and so would need to have two pull-up resistors moved from the board for use with the 3.3V system of the Pico. The resistors are R2 and R3 in the above image. The boards also needed to have headers installed.
Connections
Only four connections were needed: GND: Ground VCC: 3.3V SDA: GP0 SCL: GP1
Luckily CircuitPython has a library for use with the DS1307, complete with an example code listing.
I installed the required libraries and ran the example code. An error came up complaining about a lack of pull-up resistors.
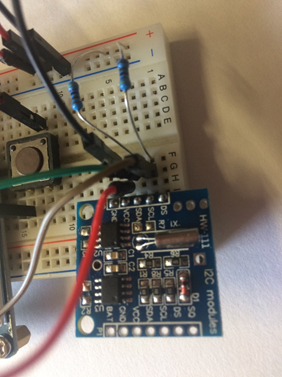
Martin’s RTC Set up with Resistors…
I installed a couple of resistors, anything around 3.3k should be fine, between the SDA/SCL pins and VCC (3.3V) and ran the code again.
This time there were no errors. The code, see below, has a part where you can set the time by changing the ‘if False’ statement to ‘if True’. Once this has been done change it back to False. The RTC clock will continue to keep the time even after the Pico has been powered off.
Code listing
import time
import board
import adafruit_ds1307
# To create I2C bus on specific pins
import busio
i2c = busio.I2C(board.GP1, board.GP0) # Pi Pico RP2040
rtc = adafruit_ds1307.DS1307(i2c)
# Lookup table for names of days (nicer printing).
days = ("Sunday", "Monday", "Tuesday", "Wednesday", "Thursday", "Friday", "Saturday")
if False: # change to True if you want to set the time!
# year, mon, date, hour, min, sec, wday, yday, isdst
t = time.struct_time((2022, 5, 6, 15, 2, 15, 5, -1, -1))
# you must set year, mon, date, hour, min, sec and weekday
# yearday is not supported, isdst can be set but we don't do anything with it at this time
print("Setting time to:", t) # uncomment for debugging
rtc.datetime = t
print()
# pylint: enable-msg=using-constant-test
# Main loop:
while True:
t = rtc.datetime
# print(t) # uncomment for debugging
print(
"The date is {} {}/{}/{}".format(
days[int(t.tm_wday)], t.tm_mday, t.tm_mon, t.tm_year
)
)
print("The time is {}:{:02}:{:02}".format(t.tm_hour, t.tm_min, t.tm_sec))
time.sleep(1) # wait a second
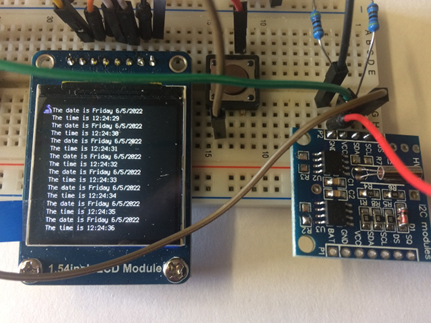
Readouts from the RTC
Realisation
After doing this I realised that because I was connected to pin 36 (3V3 out) that I hadn’t actually needed to remove the on board resistors and wouldn’t need the added pull-up resistors either.
I soldered headers to the remaining two boards to test that I was correct and indeed I was. So we now have three working realtime clocks, but one of them needs pull-up resistors.
Object Orientated Programming in CircuitPython to make Digital Trees
We think we’ve taken the Asteroids development as far as we can just now (looking at speeding up the FFT calculations)… but, in the mean time, Phil has started re-visiting an old passion… OOP Trees!
Object Orientated Programming in CircuitPython to make Digital Trees… Phil used to play with Macromedia Director 8 / 8.5 (!) and made some digital trees. Phil’s had an idea of re-visiting making OOP trees, but on the tiny Raspberry Pi Pico using CircuitPython…
Over 2 days, Phil’s successfully written a Tree Class, thinking of a tree as a series of “nodes” – He passed several key parameters to the Tree Class, an X,Y location, how many nodes the tree will have (“the Trunk”), how much those nodes can vary in direction from each other & how far they will be from each other. t = Tree() # Params cut out for ease here
Phil had a brainwave, to define all the lengths & angles “at the start” – and then “simply” multiply the values by a scale (from 0 to 1) – the “age” of the tree… so the entire tree is drawn but “scaled down” (to 0) at the start & in a loop, slowly increase the tree’s “age” by a tiny increment… giving the impression of growth! (it all worked smoothly! Not bad for a self taught N00B(!) – Phil’s sure there are probably a lot of pythonic conventions that need to be learned! ).
So, having a “working trunk” growing & stretching nicely, Phil wondered about adding branches… The thing is, they are nearly identical to a Trunk, just that the base of the 1st node isn’t “at a fixed point” (in the “ground”) – but a node on the Trunk (or even another Branch!). With a quick addition of “fNode” (“follow node”) – the Trunk having fNode = None & a branch having fNode = parentNode, he added in the code.py t.newBranch([2,3,3,4, 10]) The array passed, are positions of nodes in t (duplicates just add more branches to that node!). He even put in an error check to see if a node requested is in the range of the parent’s nodes! IT ALL WORKED! woohoo! The Branch grows just like the Trunk, but its base node follows the position of its parent node!
With the branches & trunk now growing nicely (and stopping growing when it reaches the scale of 1), Phil turned to add in leaves… a new Class “leaf” was added to the script & contains info of a colour of leaf, the radius of the leaf (using vectorIO.Circle objects) . Phil thought that the control of when / where & how many leaves appear should be decided by each node (on the trunk or branches). Passing several random numbers to determine how many, how big, how far away from the node they should be was passed in to the object. A few functions Phil’s made (“utility scripts”) like getting an X,Y position based on a known x,y position + length & angle (using Pythagoras) & adding a random range of R G B values to a “base R G B” colour to get variations of greens / browns (any colour!) – Phil rendered out leaves a hoy! But, things were slowing down again on the tiny Pico… So Phil decided to only render leaves when their parents reached specific criteria (age / length away from root) – and this gave a lovely effect of the leaves slowly blinking into existence, as the tree aged!
Phil was inspired & energised , getting into a “playful” development state…”I’ll try this!” he thought… boom! it works! And so, he added a few playful things, like a random “gust of wind” that jiggles the nodes occasionally, increasing & decreasing the scale quickly with the 2 buttons from week 1 … so many possibilities …
Anyway, if you want to have a play (& probably hone / improve the OOP!) download the scripts for the Pico set up here. Have fun!
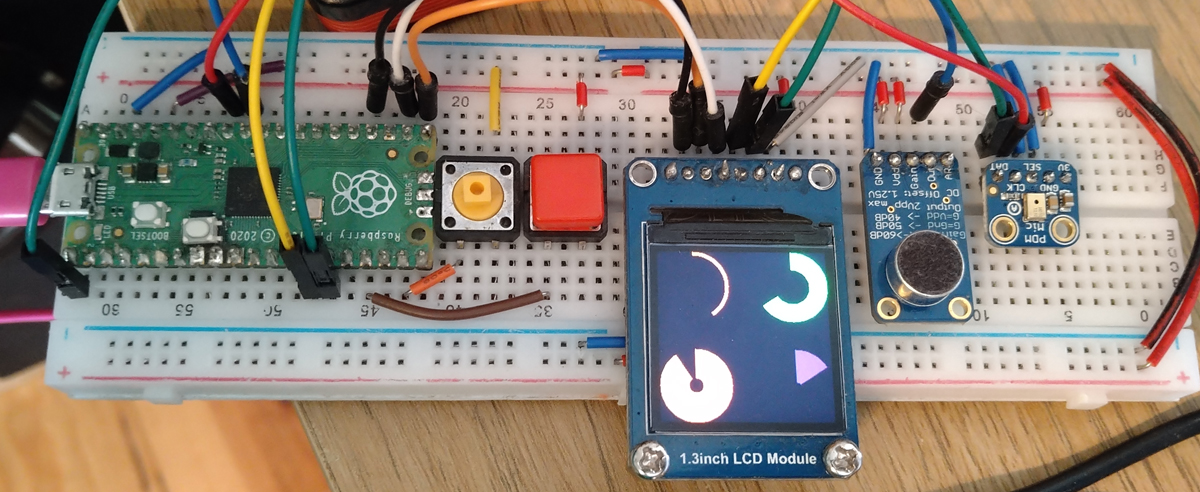
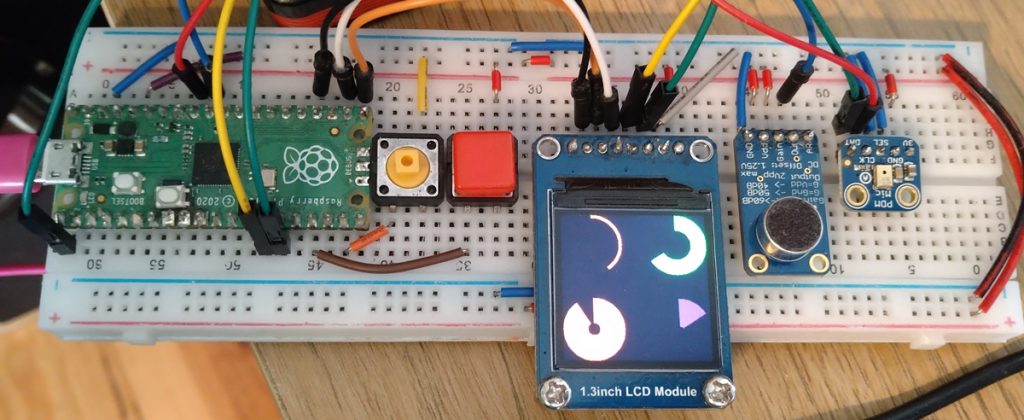
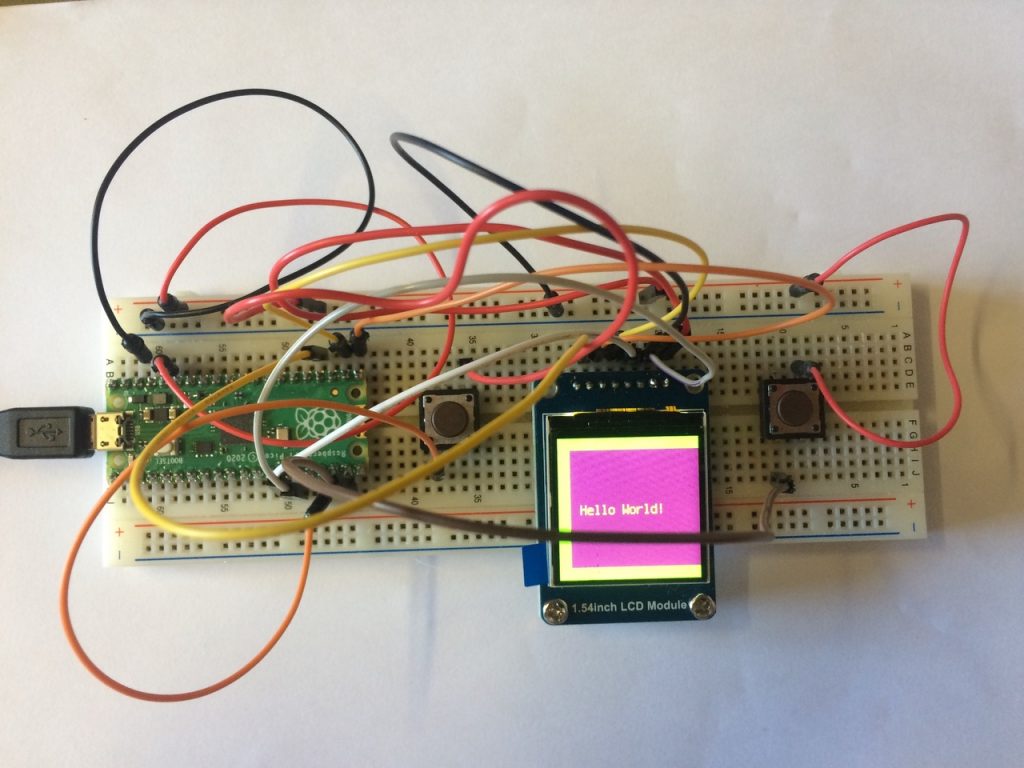
A slight “side track” to the flow of the project, but, Phil’s written a document about the “circular bar” graphic idea he had & some of the findings & thoughts as to how to make it better.
A slight “side track” to the flow of the project, but, Phil’s written a document about the “circular bar” graphic idea he had & some of the findings & thoughts as to how to make it better. Click here to download the PDF… This example requires some of the equipment featured above (OLEd screen) – but omits the mic / buttons for simplicity. The zip file of the code.py & libraries is here
Four “CircleBar” objects reacting to a generated angle value in CircuitPython
<EDIT> We’re super chuffed that we got featured in the Circuit Python newsletter </EDIT>
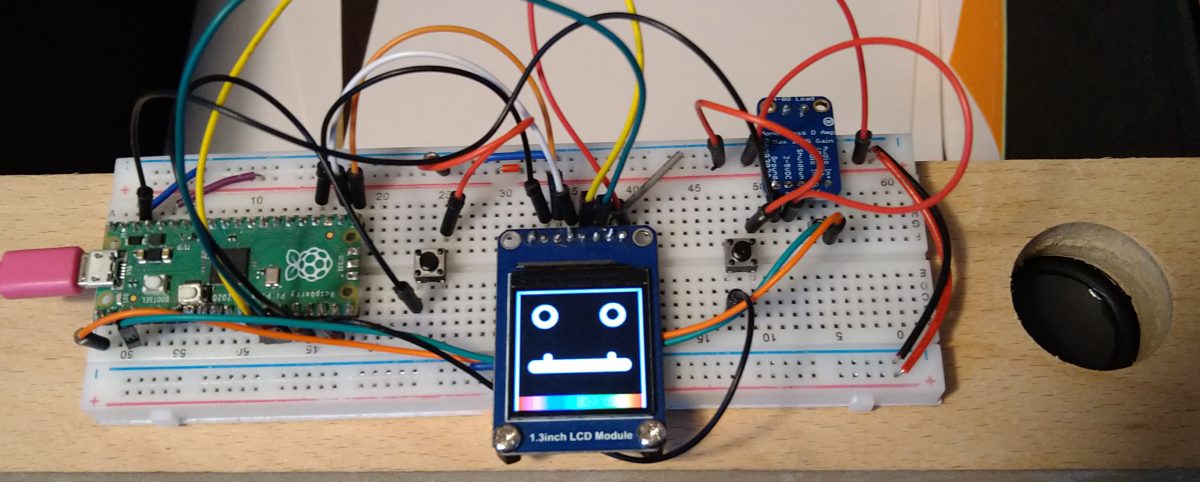
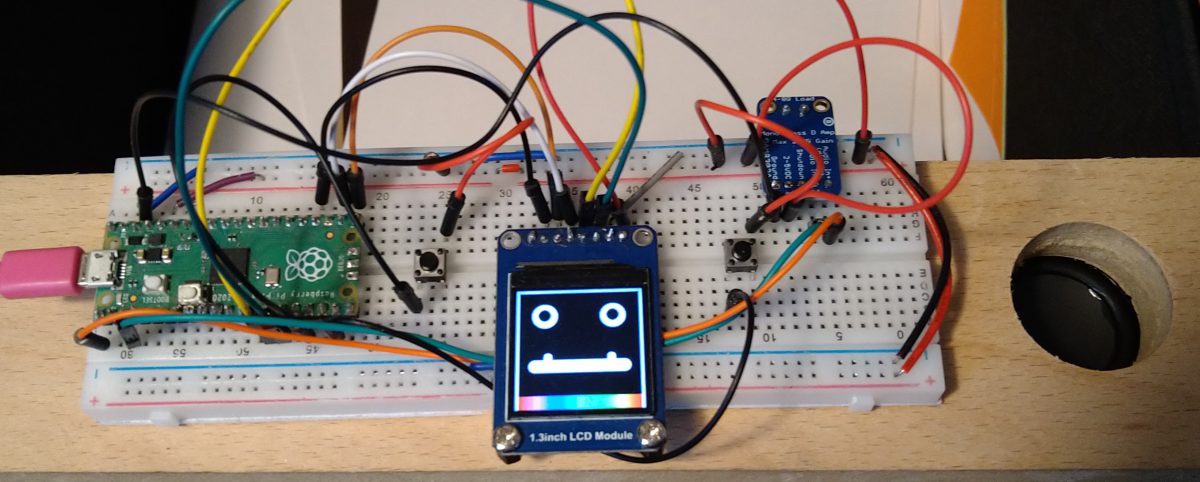
We are thinking that we could take the experiment into the realms of “playback / record” by adding a mic to the set up.
We are thinking that we could take the experiment into the realms of “playback / record” by adding a mic to the set up. There are several types of microphones to choose from, Martin started to use a 3 pinned MAX4466 mic, Phil used a 5 pinned Ada Fruit MAX9814 . Martin succinctly states:
“A microphone produces an analogue signal whereas the Pico needs a digital signal to work with. The RP2040 processor has four ‘analogue to digital’ converters, three of which are available on the Pico. An analogue to digital converter, ADC, converts the analogue signal to a digital signal that can be read by the Pico. The Pico ADC’s are 12 bit, returns a value between 0 and 4095. However CircuitPython is written to work across a number of devices and returns a 16 bit value, 0 – 65535”.
With these ranges in mind, Phil wrote the code to convert the mic signal into a range that displays a circle using vectorIO with a variable radius. Previously using circuitPython’s “displayIO shapes“, Phil found that it was difficult to change the size of a circle “on the fly” once a shape object had been created with displayIO. One of the great features of vectorIO is that “radius” is a mutable attribute (the value can be changed “on the fly”), so with a screen of 240 x 240 pixels, Phil placed the circle object in the centre of the screen & converted the mic input range to 0-120 px. After experimentation of what the actual values were for his MAX9814 Mic, Phil discovered that the “minimum” (at rest) was around 24,000 and the peak value was around 36000.
The code below is a very handy “mapping” function in python, we use it all the time in projects to convert a value from one range to the corresponding value in another range!
def mapFromTo(v, oldMin, oldMax, newMin, newMax):
#v = passed value (should be inside the oldMin/oldMax range!)
newV = (v-oldMin)/(oldMax-oldMin)*(newMax-newMin)+newMin
return newV
We love a bit of sound! So, we’ve decided to add a speaker to the Pico set up…
We love a bit of sound! So, we’ve decided to add a speaker to the Pico set up… But with the added fun of trying to make one from scratch!Martin’s DIY Speaker
Martin used some re-cycled motors for the insulated copper wire for the guts of a DIY Speaker & has had success! (all be it quiet, but, this project is about testing, trying, proof of concept etc)…
DIY Speaker!
For the full documentation, & Step By Step Guide on how to make a speaker from a cup & some old motor / electronic parts, download “week 2” pdf sheets, with code & materials lists etc.Phil’s Set up uses a bought speaker & Ada Fruit Amplifier
We also create projects where CircuitPython as supported by Adafruit is the main programming language. We’ve created a page for it, but we’ll keep posting blogposts here as a way of documenting it …
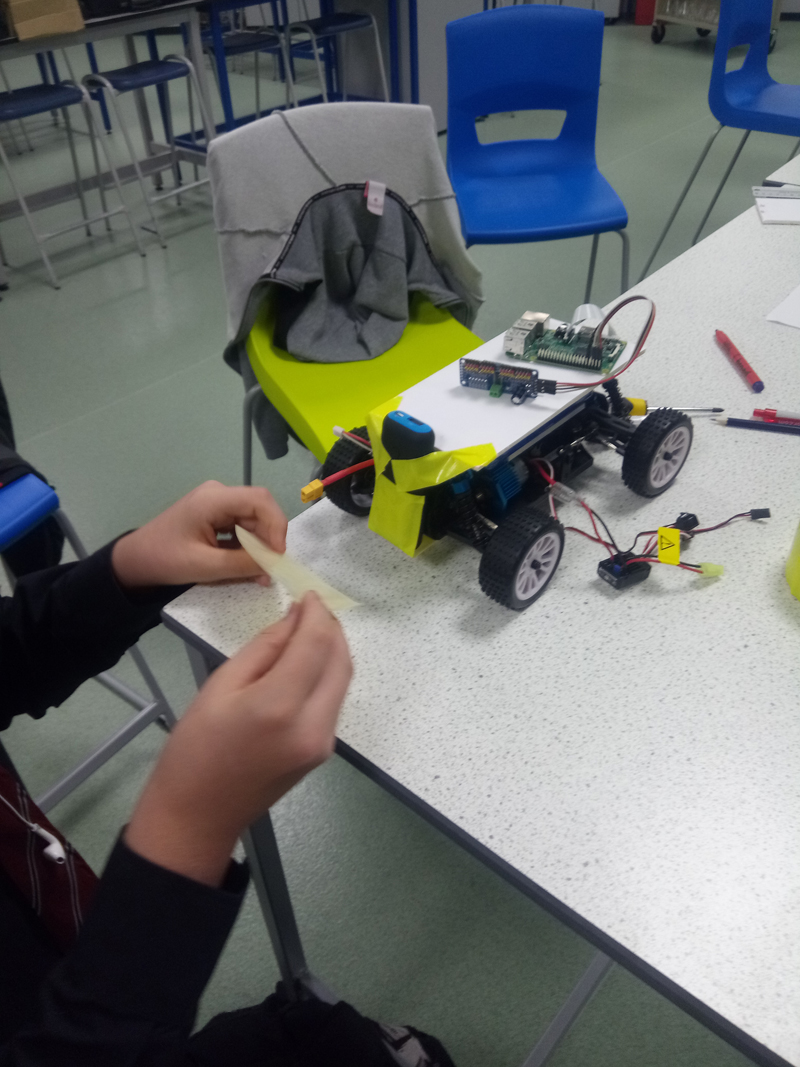
We have been fortunate to be awarded a Big Lottery grant for 5 Driverless Car workshops in the North East of Scotland! We have arranged with Peterhead Academy & Inverurie Academy to start this term, Peterhead have an Afterschool Club for S2+ and We’ll be working with the Inverurie S3 Engineering class.
We’re running the Driverless Car workshop we piloted with Northfield Academy & Transition Extreme after school clubs (funded by ACC’s U-decide (participatory Budgeting)) – so a five week course, introducing the concepts of Machine Learning & Driverless Car technology.
Week one is always relaxed, fun & creative, with the teams creating their car chassis, camera mounts and raspberry pi placements. The Peterhead pupils were fantastic, engaged, entertained, interested, enthusiastic and inquisitive, all the attributes we love to see in innovators of tomorrow!
Below are a few photos from tonight’s session, we look forward to working with the class for the next 4 weeks!
If you’d like to know more about the Driverless Car workshop, want to get us into your school, or have any other questions about our STEAM activity, do email us! we’re getting busy!
Big thanks to the Big Lottery funding, it’s been invaluable! A lot of kids that wouldn’t usually get this type of STEAM education are now, thanks to this funding.