
We’re super chuffed to have been featured in the Ada Fruit Daily for Microcontrollers this week! With the flurry of activity surrounding the new #raspberryPi #pico microcontroller, it’s great to see so many interesting projects popping up all over the world with the new #RP2040 chip.
Dinky OSC – Raspberry Pi Pico
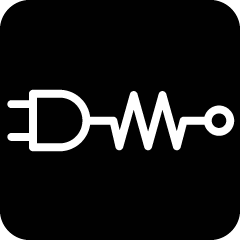
Eye Script test for the Dinky OSC with #Micropython on the #RaspberryPi #Pico
With the release of the #RaspberryPi #Pico in the last week of January 2021, we jumped at the chance to use it & the power of the newly developed RP2040 chip at the heart of the #DinkyOSC .
Using #micropython – we started exploring some of the initial components we think we’ll need for the DinkyOSC, buttons, potentiometers (“pots”), sliders and, the tiny 128×64 px SSD1306 OLED Display unit. Phil made an “eye Object” that takes values from the slider & pot & converts it to an X,Y position for the pupil of the Dinky Eye (graphic).
You can download the script (in a Zip) from here
Phil, as part of this project, will be writing guides & creating “step by step” procedures – so, he will work on this example as a first port of call. He himself is on a learning curve of how to write better python / micropython scripts & focussing on #objectOrientateProgramming to create shareable “modules” for the Dinky OSC, so if you see any glaring errors, do let him know as helpfully as you can. 😉
For an excellent start to using your own #pico – check out https://datasheets.raspberrypi.org/pico/raspberry-pi-pico-python-sdk.pdf
Dinky OSC – First Post!
We’ve been funded by Creative Scotland to explore the creation of a prototype “Dinky OSC” device to use with Sonic Pi

Hello! We’re so happy to be writing this post!
We had a tough 2020, with all of our (much loved) STEAM workshops cancelled due to #Covid19 – Everyone’s offering free online “how to” videos so we (Digital Maker CIC) needed to develop something to support our business while we wait for the ability to “run workshops physically” gets back to some sense of normality.
One of our most successful workshops so far (for WOW factor, creativity, ‘lightbulb’ moments) has been using Sam Aaron’s Sonic Pi – so we thought about making something that not only supports learners using Sonic Pi – but even advanced users, (musicians!) with an external OSC (“open sound control”) device. A small interface that can be programmed (or used “out the box”) to manipulate parameters in Sonic Pi “Real Time”.
We applied to Creative Scotland’s Open Fund: Sustaining Creative Development & have been successful in securing funding to develop our idea…
Our mission is to create a small, affordable OSC unit that is easy to use and helpful when creating music with Sonic Pi.
We will keep you posted through this blog on our journey.
Phil.
DM CIC’s Martin & Phil become Pi Accredited Educators!
Early in June, Digital Maker CIC’s Martin & Phil both attended the amazing Raspberry Pi #Picademy – a two day event, training digital makers / teachers / educators.
The first day gave the attendants insight into several GPIO (General Purpose Input/output) devices & addons for the Raspberry Pi and a great intro into the music making program “SonicPi”. Short presentations were given, with step by step guides for the participants to follow. We started with the classic “blinking LED” attached to the GPIO Pins, using python to program the LED. We moved on to using a “sense hat” and “explore hat”, devices that plug into the GPIO pins of the Raspberry Pi, and contain sensors or motor controllers etc. Again, short “step by step” introductions to the devices, how to use them and how to program them in python were given, with “playtime” of about 20 minutes to see what the participants could come up with.
We were also asked to participate in visualisations of how a breadboard works (how electricity flows through the board, wires, resistors and LEDs). We ended the day with a short “lets make something from the junk box and motor controllers” – with a mad dash to make something fun & eye catching with cardboard tubes, pipe cleaners and “bits n bobs”.
Day 2 was set for a full day of working in teams to use what we had learned in day one, but “bigger & better”, mixing up various inputs & outputs.
Martin had been looking forward to working on an OpenCV project he’d started, and our team worked n making a wheeled robot that could detect “traffic lights” (green = go!, red = stop!). We succeeded much to the surprise of some people’s experience of using OpenCV previously (in such a short space of time).
It was a really exciting, challenging & fun day, and overall experience. A room full of intrepid makers & educators, playing with the Pi & Kit, all making interesting “inventions”, which ultimately stimulated problem solving, creativity and communication (of ideas / progress etc).
Digital Maker CIC were really chuffed with the whole event, not only for just being accepted on this prestigious course, with amazing support & encouragement from the Pi Team, but that our workshops are set up in a similar fashion, giving us the confidence that we’re on the right lines when it comes to working with digital making, creative thinking, problem solving, communication and general “growth mindset” when creating interactive objects through prototyping & GPIO powered by a Pi (or even a MicroBit or Arduino).
If you can get yourself onto a #Picademy, we’d highly recommend that you do, we have learned a great deal from it, and we’ll be applying many lessons to our own practice & workshops in future.

@LegoJames
Adafruit PyPortal UK tide viewer

A little while ago Adafruit produced a learning guide for the PyPortal that displayed tidal data https://learn.adafruit.com/pyportal-tides-viewer/overview unfortunately this was only suitable for use in the USA. I decided to see what changes were required to make a version that could use UK tidal data. In the first instance have a look at the guide and download and play with the code provided
Uk tidal data
A quick search on duck duck go revealed that the Admiralty Maritime Data Solutions, part of the UK Hydrographic office, have a freely available API.
You can register for an account here https://admiraltyapi.portal.azure-api.net/ Once signed up and logged in there is plenty of information about their API and a couple of tools to play with. As part of the process you will receive a couple of keys needed to authenticate you when requesting data.
Details of high and low tide, time and height can be obtained for between one and seven days.
PyPortal
I initially looked at just displaying todays high and low tide, the same as Adafruit. Thinking it would just be a simple matter of plugging in a new API address. A number of days later!!! I had a solution. One major issue was the issue of Authentication. All examples provided by Adafruit passed any authentication strings in the URL Datasource querystring. The Admiralty use an Azure server that is set to receive authentication in a header and not the querystring. A quick check revealed that the default PyPortal library did not support this, although it was supported in libraries further down the stack.
I implemented the functionality in a forked version of PyPortal, this has now been added to PyPortal and is available in all new releases.
Code changes
A copy of my code is provided below. The STATION_ID used is for Peterhead, my nearest tidal station. You will also need to add two keys to the secrets.py file
'Ocp-Apim-Subscription-Key' : 'primary key',
'tidal_secondary' : 'secondary key',Additional changes are in the pyportal call where we add a headers field.
headers={"Ocp-Apim-Subscription-Key":secrets['Ocp-Apim-Subscription-Key']},The JSON data returned is in the form of an array so needed to be converted to a DICT format
raw_info = json.loads(raw_info)The times returned also needed to be reformatted
for i, hi_time in enumerate(tide_info["HighWater"]):
HI_LABELS[i].text = '{:.5}'.format(hi_time)
for i, lo_time in enumerate(tide_info["LowWater"]):
LO_LABELS[i].text = '{:.5}'.format(lo_time)Most of the existing code was reused
Completed code
import time
import board
from adafruit_pyportal import PyPortal
from adafruit_bitmap_font import bitmap_font
from adafruit_display_text.label import Label
import json
from secrets import secrets
#--| USER CONFIG |--------------------------
STATION_ID = "0245" # tide location, find yours from admiralty website/
HI_COLOR = 0x00FF00 # high tide times color
LO_COLOR = 0x11FFFF # low tide times color
DATE_COLOR = 0xFFFFFF # date and time color
#-------------------------------------------
# pylint: disable=line-too-long
DATA_SOURCE = "https://admiraltyapi.azure-api.net/uktidalapi/api/V1/Stations/" + STATION_ID + "/TidalEvents?duration=1"
DATA_LOCATION = []
# determine the current working directory needed so we know where to find files
cwd = ("/"+__file__).rsplit('/', 1)[0]
pyportal = PyPortal(url=DATA_SOURCE,
headers={"Ocp-Apim-Subscription-Key":secrets['Ocp-Apim-Subscription-Key']},
json_path=DATA_LOCATION,
status_neopixel=board.NEOPIXEL,
default_bg=cwd+"/tides_bg.bmp")
# Connect to the internet and get local time
pyportal.get_local_time()
# Setup tide times font
tide_font = bitmap_font.load_font(cwd+"/fonts/cq-mono-30.bdf")
tide_font.load_glyphs(b'1234567890:')
# Setup date and time font
date_font = bitmap_font.load_font(cwd+"/fonts/Arial-12.bdf")
date_font.load_glyphs(b'1234567890-')
# Labels setup
HI_LABELS = [ Label(tide_font, text="00:00", color=HI_COLOR, x= 40, y= 80) ,
Label(tide_font, text="00:00", color=HI_COLOR, x= 40, y=165) ]
LO_LABELS = [ Label(tide_font, text="00:00", color=LO_COLOR, x=180, y= 80) ,
Label(tide_font, text="00:00", color=LO_COLOR, x=180, y=165) ]
DATE_LABEL = Label(date_font, text="0000-00-00 00:00:00", color=DATE_COLOR, x=75, y=228)
# Add all the labels to the display
for label in HI_LABELS + LO_LABELS + [DATE_LABEL]:
pyportal.splash.append(label)
def get_tide_info():
"""Fetch JSON tide time info and return it."""
# Get raw JSON data
raw_info = pyportal.fetch()
raw_info = json.loads(raw_info)
# Return will be a dictionary of lists containing tide times
new_tide_info = {"HighWater":[], "LowWater":[]}
# Parse out the tide time info
for info in raw_info:
tide_type = info['EventType']
tide_time = info['DateTime'].split("T")[1]
new_tide_info[tide_type].append(tide_time)
return new_tide_info
def update_display(time_info, update_tides=False):
"""Update the display with current info."""
# Tide time info
if update_tides:
# out with the old
for tide_label in HI_LABELS + LO_LABELS:
tide_label.text = ""
# in with the new
for i, hi_time in enumerate(tide_info["HighWater"]):
HI_LABELS[i].text = '{:.5}'.format(hi_time)
for i, lo_time in enumerate(tide_info["LowWater"]):
LO_LABELS[i].text = '{:.5}'.format(lo_time)
# Date and time
DATE_LABEL.text = "{:04}-{:02}-{:02} {:02}:{:02}:{:02}".format(time_info.tm_year,
time_info.tm_mon,
time_info.tm_mday,
time_info.tm_hour,
time_info.tm_min,
time_info.tm_sec)
board.DISPLAY.refresh_soon()
# First run update
tide_info = get_tide_info()
current_time = time.localtime()
update_display(current_time, True)
current_yday = current_time.tm_yday
# Update daily
while True:
current_time = time.localtime()
new_tides = False
if current_time.tm_yday != current_yday:
# new day, time to update
tide_info = get_tide_info()
new_tides = True
current_yday = current_time.tm_yday
update_display(current_time, new_tides)
time.sleep(0.5)
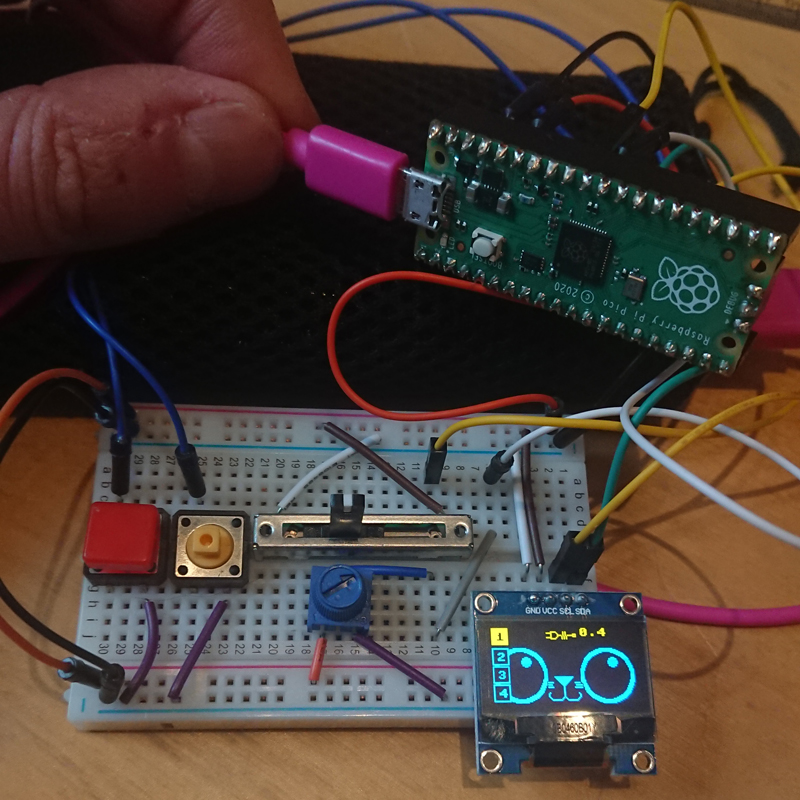
Making it graphical
The next stage of the learning guide shows the tidal data plotted over a 24 hour period with tidal times, heights provided every six minutes. The Admiralty doesn’t provide this level of detail. They only provide the high and low water times. I decided to plot them anyway. The code is provided below.
Completed code
import time
import board
import displayio
import json
from secrets import secrets
from adafruit_pyportal import PyPortal
from adafruit_bitmap_font import bitmap_font
from adafruit_display_text.label import Label
#--| USER CONFIG |--------------------------
STATION_ID = "0245" # tide location, find yours from admiralty website
PLOT_SIZE = 2 # tide plot thickness
PLOT_COLOR = 0x00FF55 # tide plot color
MARK_SIZE = 6 # current time marker size
MARK_COLOR = 0xFF0000 # current time marker color
DATE_COLOR = 0xE0CD1A # date text color
TIME_COLOR = 0xE0CD1A # time text color
VSCALE = 20 # vertical plot scale
#-------------------------------------------
# pylint: disable=line-too-long
DATA_SOURCE = "https://admiraltyapi.azure-api.net/uktidalapi/api/V1/Stations/" + STATION_ID + "/TidalEvents?duration=1"
DATA_LOCATION = []
WIDTH = board.DISPLAY.width
HEIGHT = board.DISPLAY.height
# determine the current working directory needed so we know where to find files
cwd = ("/"+__file__).rsplit('/', 1)[0]
pyportal = PyPortal(url=DATA_SOURCE,
headers={"Ocp-Apim-Subscription-Key":secrets['Ocp-Apim-Subscription-Key']},
json_path=DATA_LOCATION,
status_neopixel=board.NEOPIXEL,
default_bg=cwd+"/tides_bg_graph.bmp")
# Connect to the internet and get local time
pyportal.get_local_time()
# Setup palette used for plot
palette = displayio.Palette(3)
palette[0] = 0x0
palette[1] = PLOT_COLOR
palette[2] = MARK_COLOR
palette.make_transparent(0)
# Setup tide plot bitmap
tide_plot = displayio.Bitmap(WIDTH, HEIGHT, 3)
pyportal.splash.append(displayio.TileGrid(tide_plot, pixel_shader=palette))
# Setup font used for date and time
date_font = bitmap_font.load_font(cwd+"/fonts/mono-bold-8.bdf")
date_font.load_glyphs(b'1234567890-')
# Setup date label
date_label = Label(date_font, text="0000-00-00", color=DATE_COLOR, x=7, y=14)
pyportal.splash.append(date_label)
# Setup time label
time_label = Label(date_font, text="00:00:00", color=TIME_COLOR, x=234, y=14)
pyportal.splash.append(time_label)
# Setup current time marker
time_marker_bitmap = displayio.Bitmap(MARK_SIZE, MARK_SIZE, 3)
for pixel in range(MARK_SIZE * MARK_SIZE):
time_marker_bitmap[pixel] = 2
time_marker = displayio.TileGrid(time_marker_bitmap, pixel_shader=palette, x=-MARK_SIZE, y=-MARK_SIZE)
pyportal.splash.append(time_marker)
def get_tide_data():
"""Fetch JSON tide data and return parsed results in a list."""
# Get raw JSON data
raw_data = pyportal.fetch()
raw_data = json.loads(raw_data)
# Results will be stored in a list that is display WIDTH long
new_tide_data = [None]*WIDTH
# Convert raw data to display coordinates
for data in raw_data:
_, t = data["DateTime"].split("T") # date and time
t = '{:.5}'.format(t)
h, m = t.split(":") # hours and minutes
v = data["Height"] # water level
x = round( (WIDTH - 1) * (60 * float(h) + float(m)) / 1440 )
y = (HEIGHT // 2) - round(VSCALE * float(v))
y = 0 if y < 0 else y
y = HEIGHT-1 if y >= HEIGHT else y
new_tide_data[x] = y
return new_tide_data
def draw_data_point(x, y, size=PLOT_SIZE, color=1):
"""Draw data point on to the tide plot bitmap at (x,y)."""
if y is None:
return
offset = size // 2
for xx in range(x-offset, x+offset+1):
for yy in range(y-offset, y+offset+1):
try:
tide_plot[xx, yy] = color
except IndexError:
pass
def draw_time_marker(time_info):
"""Draw a marker on the tide plot for the current time."""
h = time_info.tm_hour
m = time_info.tm_min
x = round( (WIDTH - 1) * (60 * float(h) + float(m)) / 1440 )
y = tide_data[x]
if y is not None:
x -= MARK_SIZE // 2
y -= MARK_SIZE // 2
time_marker.x = x
time_marker.y = y
def update_display(time_info, update_tides=False):
"""Update the display with current info."""
# Tide data plot
if update_tides:
# out with the old
for i in range(WIDTH * HEIGHT):
tide_plot[i] = 0
# in with the new
for x in range(WIDTH):
draw_data_point(x, tide_data[x])
# Current location marker
draw_time_marker(time_info)
# Date and time
date_label.text = "{:04}-{:02}-{:02}".format(time_info.tm_year,
time_info.tm_mon,
time_info.tm_mday)
time_label.text = "{:02}:{:02}:{:02}".format(time_info.tm_hour,
time_info.tm_min,
time_info.tm_sec)
board.DISPLAY.refresh_soon()
# First run update
tide_data = get_tide_data()
current_time = time.localtime()
update_display(current_time, True)
current_yday = current_time.tm_yday
# Run forever
while True:
current_time = time.localtime()
new_tides = False
if current_time.tm_yday != current_yday:
# new day, time to update
tide_data = get_tide_data()
new_tides = True
current_yday = current_time.tm_yday
update_display(current_time, new_tides)
time.sleep(0.5)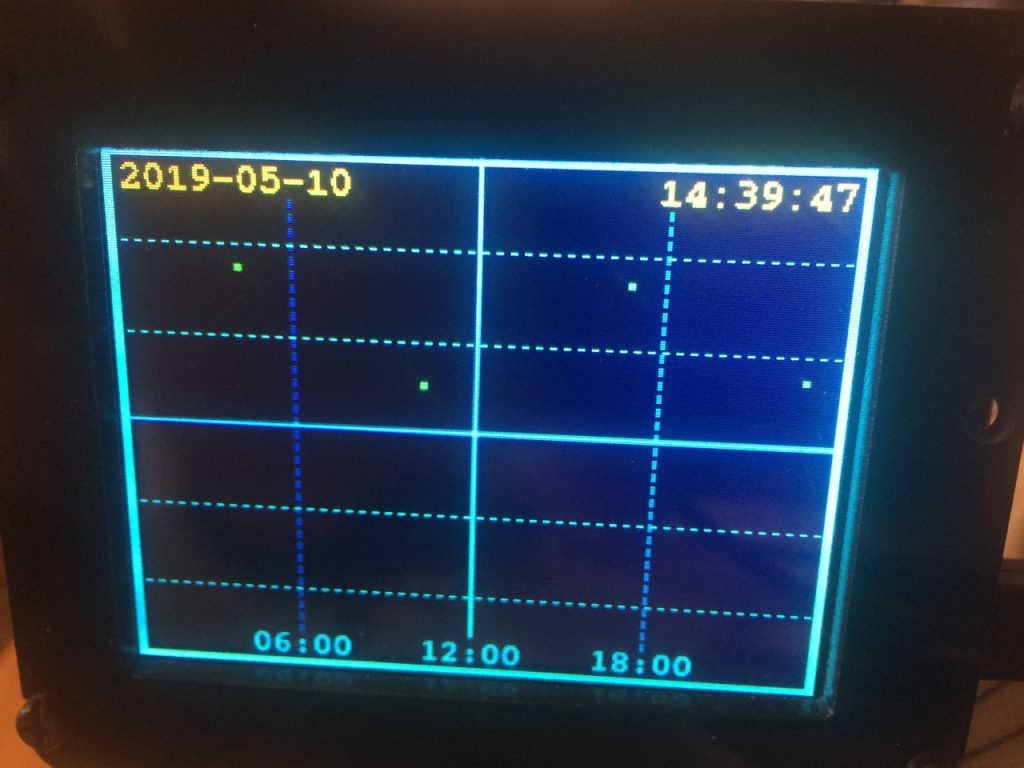
Adafruit PyPortal : CircuitPython Powered Internet Display
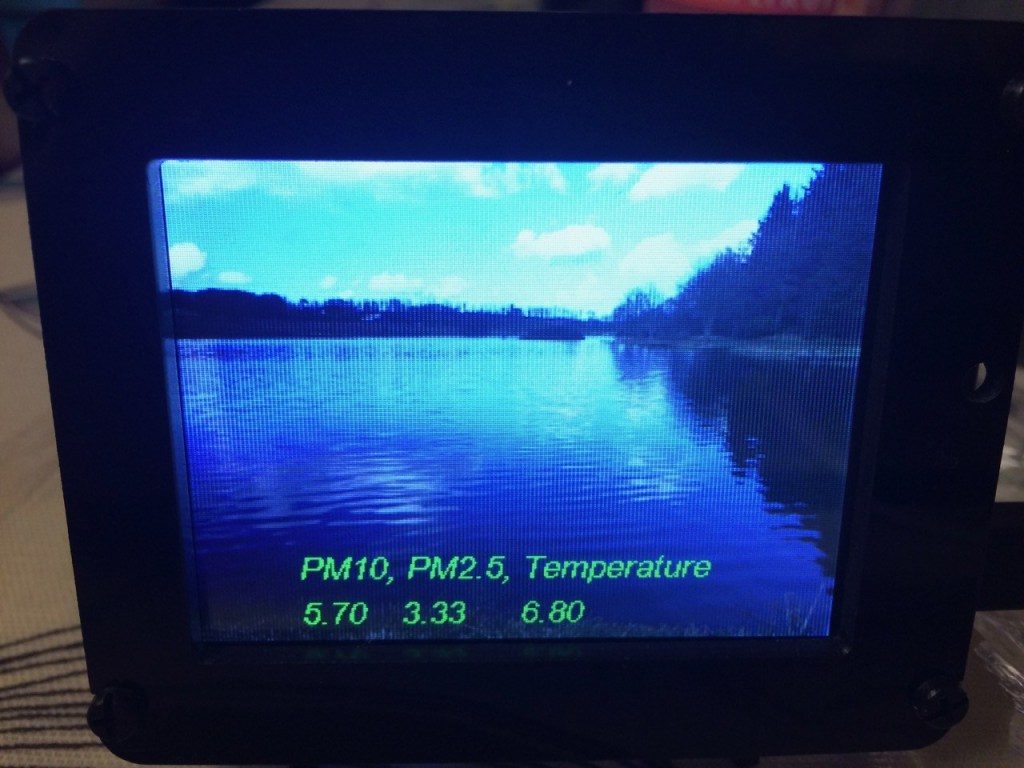
I’ve been playing with the Adafruit PyPortal recently, a 3.5 inch touchscreen display with in built functionality to quickly build Internet of Things, IoT, projects.
The first thing I built was a viewer for my Luftdaten Air Quality Sensor. I had connected my sensor to opensensemap as I liked the way that they displayed data. They also provide a really nice API interface.
The code I used to access my sensor is provided below
"""
This example will access the opensensemap API, grab the air quality values
pm10, pm2.5, temperature... and display it on a screen!
if you can find something that spits out JSON data, we can display it
"""
import time
import board
from adafruit_pyportal import PyPortal
# Set up where we'll be fetching data from
DATA_SOURCE = "https://api.opensensemap.org/boxes/5c6ec1ae15451500198f5abe" # pylint: disable=line-too-long
PM10 = ["sensors",0, "lastMeasurement","value"]
PM25 = ["sensors",1, "lastMeasurement","value"]
TEMP = ["sensors",2, "lastMeasurement","value"]
# the current working directory (where this file is)
cwd = ("/"+__file__).rsplit('/', 1)[0]
# Initialize the pyportal object and let us know what data to fetch and where
# to display it
pyportal = PyPortal(url=DATA_SOURCE,
json_path=(PM10, PM25, TEMP),
status_neopixel=board.NEOPIXEL,
default_bg=cwd+"/IMG_6562.bmp",
text_font=cwd+"/fonts/Arial-ItalicMT-17.bdf",
text_position=((50, 225), (100, 225), (160, 225)),
text_color=(0x00FF00,0x00FF00,0x00FF00),
caption_text="PM10, PM2.5, Temperature",
caption_font=cwd+"/fonts/Arial-ItalicMT-17.bdf",
caption_position=(50,200),
caption_color=0x00FF00)
# track the last value so we can play a sound when it updates
while True:
try:
value = pyportal.fetch()
print("Response is", value)
except (ValueError, RuntimeError) as e:
print("Some error occured, retrying! -", e)
time.sleep(180) # wait a minute before getting againIt’s all done with CircuitPython.
I quite liked the result shown below. The picture in the background is of a local lake.
Big Lottery funded DM CIC workshops start in Peterhead
We have been fortunate to be awarded a Big Lottery grant for 5 Driverless Car workshops in the North East of Scotland! We have arranged with Peterhead Academy & Inverurie Academy to start this term, Peterhead have an Afterschool Club for S2+ and We’ll be working with the Inverurie S3 Engineering class.
We’re running the Driverless Car workshop we piloted with Northfield Academy & Transition Extreme after school clubs (funded by ACC’s U-decide (participatory Budgeting)) – so a five week course, introducing the concepts of Machine Learning & Driverless Car technology.
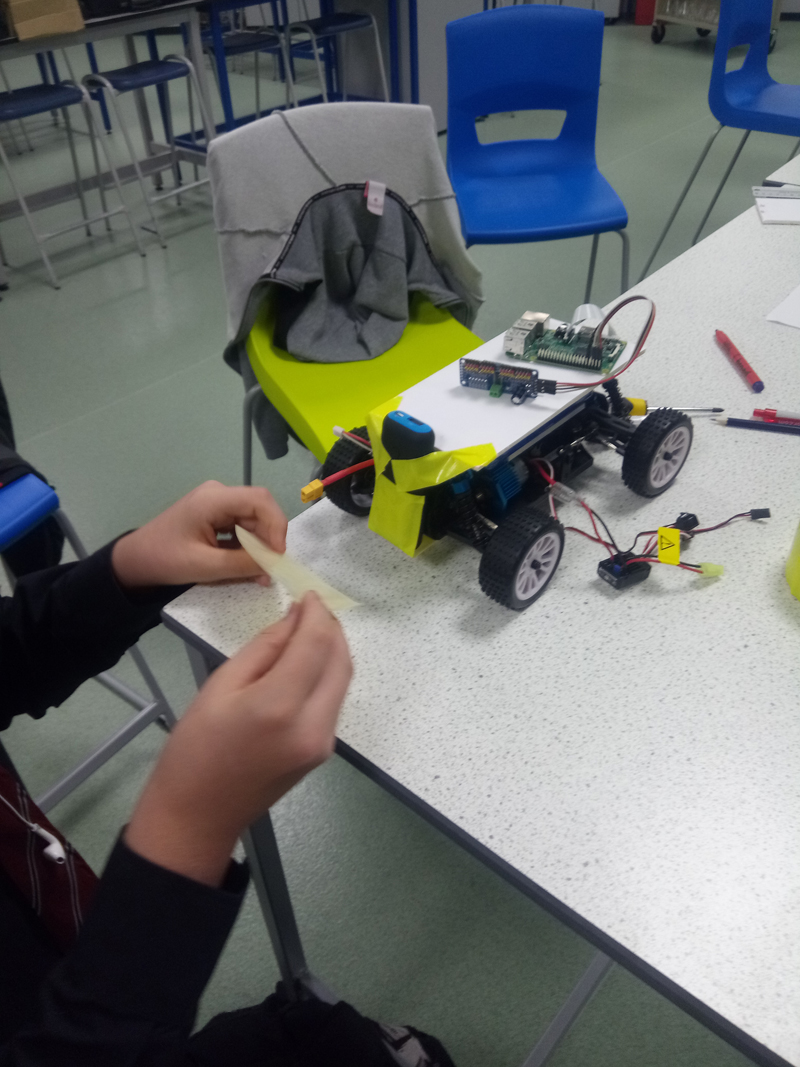
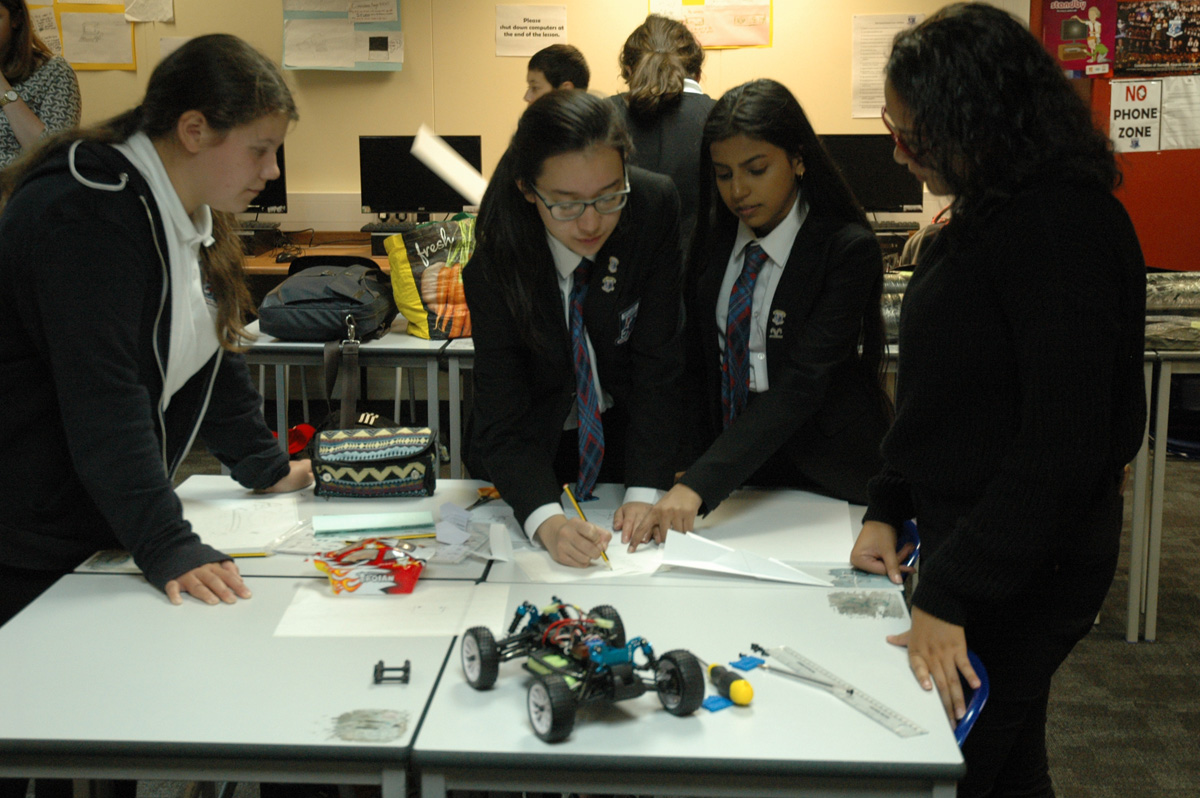
Week one is always relaxed, fun & creative, with the teams creating their car chassis, camera mounts and raspberry pi placements. The Peterhead pupils were fantastic, engaged, entertained, interested, enthusiastic and inquisitive, all the attributes we love to see in innovators of tomorrow!
Below are a few photos from tonight’s session, we look forward to working with the class for the next 4 weeks!
If you’d like to know more about the Driverless Car workshop, want to get us into your school, or have any other questions about our STEAM activity, do email us! we’re getting busy!
Big thanks to the Big Lottery funding, it’s been invaluable! A lot of kids that wouldn’t usually get this type of STEAM education are now, thanks to this funding.


Driverless Car workshops – a five week course
Digital Maker CIC recently completed two 5-week driverless car workshops in Aberdeen. Northfield academy’s Science Club & Transition Extreme After School Club each had an exciting and challenging set of workshops for children aged 12+. Digital Maker CIC believes that these workshops are a “first” for the UK. Both projects were funded by Aberdeen City Council’s “U-decide” (participatory budgeting project).
The participants learned about Machine Learning, Engineering & design of the 1:16th scale cars, raspberry Pi terminal commands, to interface with the cars, computers & cloud computing interfaces and driving the remote-controlled cars.
Working in teams of four, the pupils were given tasks of constructing & managing their cars, “training” and improving their driving skills, as the better the car is driven, the better the Machine Learning model will be. The pupils could quickly train & then produce ML models (via cloud computing), giving exciting results, as the cars drove themselves around the 4m2 tracks we use. The pupils quickly learned that the better they drove the cars, the automated driving improved.
The teams also tried to add obstacles (orange cones) into the modelling, creating various results (success & failure), but, with more training & time, the pupils understood that their cars would “get better” with time.
We’d like to thank Northfield Academy & Transition Extreme Sports Ltd for their support & use of space, in order that we could run the workshops. We are working on extending the workshops to Aberdeenshire & eventually have a North East interschools competition for the Driverless Car technology.
If you’d like more information, or want your school to participate in this project, please do get in touch!
AwesomeTech@digital-maker.co.uk




Digital Maker CIC – CPD for the College Development Network
Digital Maker CIC had the privilege of being asked to run a robotics challenge workshop for the CDN (College Development Network Scotland) in Dundee & Angus College’s Gardyne campus on Friday 28th of September for over 20 College Lecturers.
Teams from all over Scotland joined us for a fun day, exploring, building & programming robots in order to compete in various challenges once the teams were ready. We gave each team a CamJam robotics kit with minimal worksheets / instructions and spent around 30 mins building the kits, using raspberry Pi Zeros & piTop Ceeds (to control / interface with the robot rover via 5 meter USB cable). the Edinburgh team took the initiative to make their rover wirelessly controlled, downloading & installing software through their own phone (extra points there!)
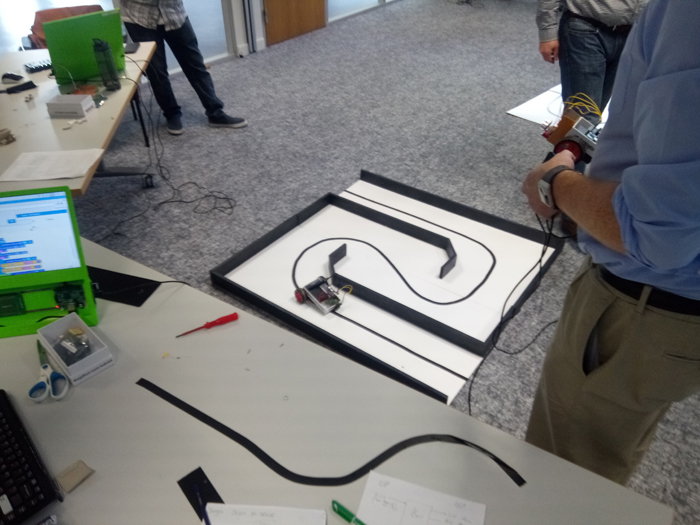
Once everyone had built & played with their rovers, controlling it via simple on-screen button & programmable interfaces (Custom Adapted Blockly by Digital Maker CIC), we then added a line detection sensor, giving the participants experience in electronics & GPIO use on the Pi Zero. The challenge was to create a line following algorithm using only 1 sensor & the Blockly interface, to get the team’s rover around a line path in the quickest time. There were a lot of different approaches, using repeat loops, “if statements” and more. One of the most elegant solutions was a simple algorithm by West Lothian College.
All teams produced line following algorithms with varying degrees of success, but, all teams were resilient & spent time honing their algorithms, trying various tweaks & fixes based on their observations, critical thinking & experimentation, which was great to see. The fastest line follower was under 1 minute, the longest (complete circuit) was just under 3 minutes.
Some teams managed to start exploring adding an ultrasonic distance sensor (HC SR04) to tackle the minimal maze we had brought along too, but, time had got the better of us, and after 6 hours of playing, experimenting, trying and learning, time was up!
We’d like to thank Kenji Lamb for organising the event & asking Digital Maker CIC to facilitate the workshop. We are planning to run a 2nd CDN Robotics CPD challenge with Kenji in 2019… so if you are interested, or want more information, please do get in touch!




College Development Network – DM CIC Robotics workshop

We were asked by the College Development Network to put on a robotics workshop for their CPD provision, so we gladly said YES!
Here’s a link to the course in Dundee & Angus College. They have kindly agreed to host the event at their Gardyne campus, and CDN are looking for college staff keen to exercise their engineering, programming and design skills on the 28th of September.
Full details & links are here : https://www.events.cdn.ac.uk/ehome/362505?&t=30f2d8676e7ed69370facb7507bd3a4e
